Planification de trajectoire désigne le calcul d’un chemin sûr entre un point A et un point B, compte tenu d’obstacles et de contraintes. Exemple: contourner un champ de rochers plutôt que de le traverser. C’est crucial, car un mauvais choix peut immobiliser un rover pendant des jours.
AutoNav est le système embarqué de navigation autonome qui permet au rover d’éviter des obstacles en temps réel. Exemple: repérer un rocher pointu et le contourner sans ordre humain. Importance: AutoNav gère l’instantané, l’IA de planification optimise l’itinéraire global.
La nouveauté de Perseverance conduite IA tient à l’articulation de ces deux niveaux: l’IA propose un plan de route global, et AutoNav gère la finesse des manœuvres. Comme organiser une randonnée avec un itinéraire optimisé sur smartphone, puis ajuster vos pas à chaque pierre sur le sentier.
Comment l’IA planifie une route martienne
Navcams et Hazcams sont des caméras de navigation et de détection des risques. Elles cartographient le relief en 3D et repèrent les dangers. Exemple: mesurer la hauteur d’un affleurement pour décider de le contourner. Ces données nourrissent directement les choix de trajectoire.
Carte de coût représente le terrain en cellules, chaque cellule indiquant un “coût” de passage selon la pente, la rugosité ou la proximité d’un obstacle. Exemple: un sol sableux a un coût élevé car il favorise l’enlisement. Importance: l’IA cherche l’itinéraire au coût total minimal.
Boucle perception–action désigne la séquence “j’observe, je décide, j’agis” répétée rapidement. Exemple: le rover perçoit une ondulation, ajuste sa direction de quelques degrés, puis avance. Cette boucle permet d’exécuter le plan IA sans perdre en sécurité.
Concrètement, Perseverance conduite IA calcule plusieurs itinéraires candidats, évalue leurs risques, puis sélectionne le meilleur compromis entre distance, sécurité et temps. L’IA intègre les objectifs scientifiques: rejoindre un affleurement intéressant tout en évitant des crêtes et des dunes. L’échelle est parlante: sur quelques centaines de mètres, le gain d’une dizaine de minutes et la réduction de manœuvres superflues s’additionnent sur des mois de mission.
Ce que la traversée du 10 décembre prouve
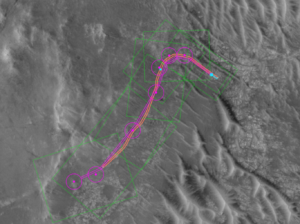
La session validée du 10 décembre démontre que Perseverance conduite IA sait proposer une route réaliste, compatible avec les capacités du rover. Le plan évite les zones de rochers épars et les ondulations de sable, tout en respectant les marges de sécurité. L’absence d’incident confirme la robustesse des paramètres.
Un point clé est la stabilité des estimations de risque le long du trajet. L’IA ne se contente pas d’un raccourci; elle favorise une régularité qui maintient la vitesse moyenne. Comme un cycliste qui choisit une avenue fluide plutôt qu’une rue truffée de nids-de-poule, le rover gagne du temps sans prendre de risques inutiles.
La coordination entre plan global et AutoNav s’avère fluide. Le système embarqué n’a pas dû multiplier les corrections de dernière minute, signe d’un plan bien préparé. Cette cohérence réduit l’usure mécanique et économise de l’énergie, deux facteurs déterminants pour la longévité de Perseverance.
Enfin, l’équipe confirme que le pipeline de préparation – de la réception des images à la génération du plan – tient dans des délais compatibles avec les opérations quotidiennes. Perseverance conduite IA devient donc une option régulière, pas un outil d’exception.
Et après ? Vers l’autonomie et le retour d’échantillons
Avec Perseverance conduite IA, l’ambition est claire: parcourir davantage entre deux journées martiennes et atteindre plus vite des cibles scientifiques. Optimisation multi-objectifs signifie concilier sécurité, énergie et science. Exemple: passer légèrement plus loin pour économiser de la batterie et arriver avec du temps pour l’analyse. Importance: la science en bénéficie directement.
Cette capacité ouvre des perspectives pour le retour d’échantillons martiens. Un trajet planifié par IA peut accélérer le rendez-vous avec des tubes d’échantillons déposés au sol, ou optimiser une approche vers une zone de dépôt. La réduction des temps morts logistiques donne plus de créneaux à la science et à la préparation de futures opérations.
Historiquement, l’autonomie progresse par étapes. Sojourner (1997) roulait par très courtes commandes. Spirit et Opportunity ont augmenté les distances, mais sous contrôle serré. Curiosity a popularisé AutoNav. Perseverance conduite IA ajoute la brique manquante: un plan de route calculé par une IA, validé puis exécuté de bout en bout.
À moyen terme, l’équipe peut enrichir l’IA avec la météo locale, des cartes orbitales plus précises, ou des modèles de glissance du sol. Comme ajuster une recette selon les ingrédients disponibles, le système s’améliore au fil des itérations de terrain.
Analyse de terrain regroupe les techniques qui évaluent pentes, textures et obstacles. Exemple: classifier un sol en cailloux stables ou en ondulations sablonneuses. Importance: mieux modéliser le risque réduit les arrêts imprévus.
Marge de sécurité est la distance minimale autour d’un danger. Exemple: garder 50 cm autour d’un rocher acéré. Importance: cette marge, choisie par l’IA, protège les roues et les instruments. Perseverance conduite IA ajuste ces marges selon le contexte.
À l’échelle d’une mission longue, les gains s’additionnent. Quelques pourcents de distance en plus par sol, c’est des semaines de science gagnées sur un an. Sur un trajet de la longueur de plusieurs terrains de football, l’IA économise des détours superflus et évite des manœuvres coûteuses.
Repères: ce qu’il faut retenir côté technique
Premièrement, Perseverance conduite IA délègue la conception de l’itinéraire à un agent expert, tout en gardant AutoNav aux commandes locales. Deuxièmement, la chaîne de données – Navcams, Hazcams, carte de coût, plan – tourne assez vite pour un usage quotidien. Troisièmement, la méthode reste vérifiable: l’équipe inspecte et valide les trajets proposés avant exécution.
Quatrièmement, l’IA s’intègre sans bouleverser la sécurité. Les garde-fous demeurent: limites de pente, zones interdites, vitesses plafonnées. Cinquièmement, la flexibilité augmente: si un aléa apparaît, AutoNav ajuste le micro-trajet, et l’IA réévaluera au prochain cycle. Perseverance conduite IA s’inscrit ainsi dans une autonomie graduelle, contrôlée et utile à la science.
En somme, l’étape du 10 décembre confirme la maturité de cette approche. Elle accélère les traversées, réduit la charge opérationnelle et sert directement les objectifs scientifiques dans le cratère Jezero.
Conclusion. Perseverance conduite IA franchit un cap majeur de l’exploration robotique. En combinant planification intelligente et navigation fine, le rover gagne en efficacité sans sacrifier la sécurité. La suite s’annonce pragmatique: plus de trajets optimisés, davantage d’échantillons à portée, et un calendrier scientifique resserré. Sur Mars, l’autonomie n’est plus une promesse; c’est désormais une pratique opérationnelle.