En 2026, la mission chinoise Chang’e 7 vise le pôle Sud de la Lune avec un atout inédit : un robot sauteur lunaire capable d’entrer dans les cratères glacés où la lumière ne pénètre jamais. Objectif : confirmer la présence d’eau sous forme de glace et d’autres composés volatils, et comprendre comment ils se déposent et évoluent. Ce jalon s’inscrit dans une stratégie d’exploration soutenue, qui prépare l’utilisation locale des ressources. Voici pourquoi ce robot sauteur lunaire change la donne et comment la mission compte l’employer.
Pourquoi un robot sauteur lunaire au pôle Sud ?
Le pôle Sud abrite des cratères en ombre permanente (PSR) : des dépressions si profondes que le Soleil ne les éclaire jamais. Ces pièges à froid, où les températures plongent sous -200 °C, préservent potentiellement de la glace d’eau depuis des milliards d’années. Un rover classique y progresse mal : pentes instables, rochers, poussière et obscurité totale. Le robot sauteur lunaire s’affranchit de ces contraintes en franchissant les obstacles par bonds contrôlés et en se posant au cœur de ces zones.
Piège à froid : région si froide que les molécules volatiles s’y condensent et y restent piégées. Exemple : l’eau ou le dioxyde de carbone peuvent geler et s’accumuler au fond des PSR. Importance : c’est là que la glace est la plus accessible et scientifiquement précieuse.
Entrer dans une PSR, c’est un peu comme explorer une cave sans électricité : on n’y voit rien, on glisse facilement, et l’air y est mordant. Le robot sauteur lunaire agit alors comme une lampe frontale agile : il éclaire, il avance par bonds courts, puis il « regarde » le sol avant de choisir son prochain point d’appui.
La science visée est double : détecter l’eau et cartographier sa distribution fine. À l’échelle, une couche de givre d’un millimètre sur dix terrains de football représente déjà des centaines de litres. Le robot sauteur lunaire vise précisément ces dépôts ténus, invisibles depuis l’orbite.
Objectifs scientifiques et instruments de Chang’e 7
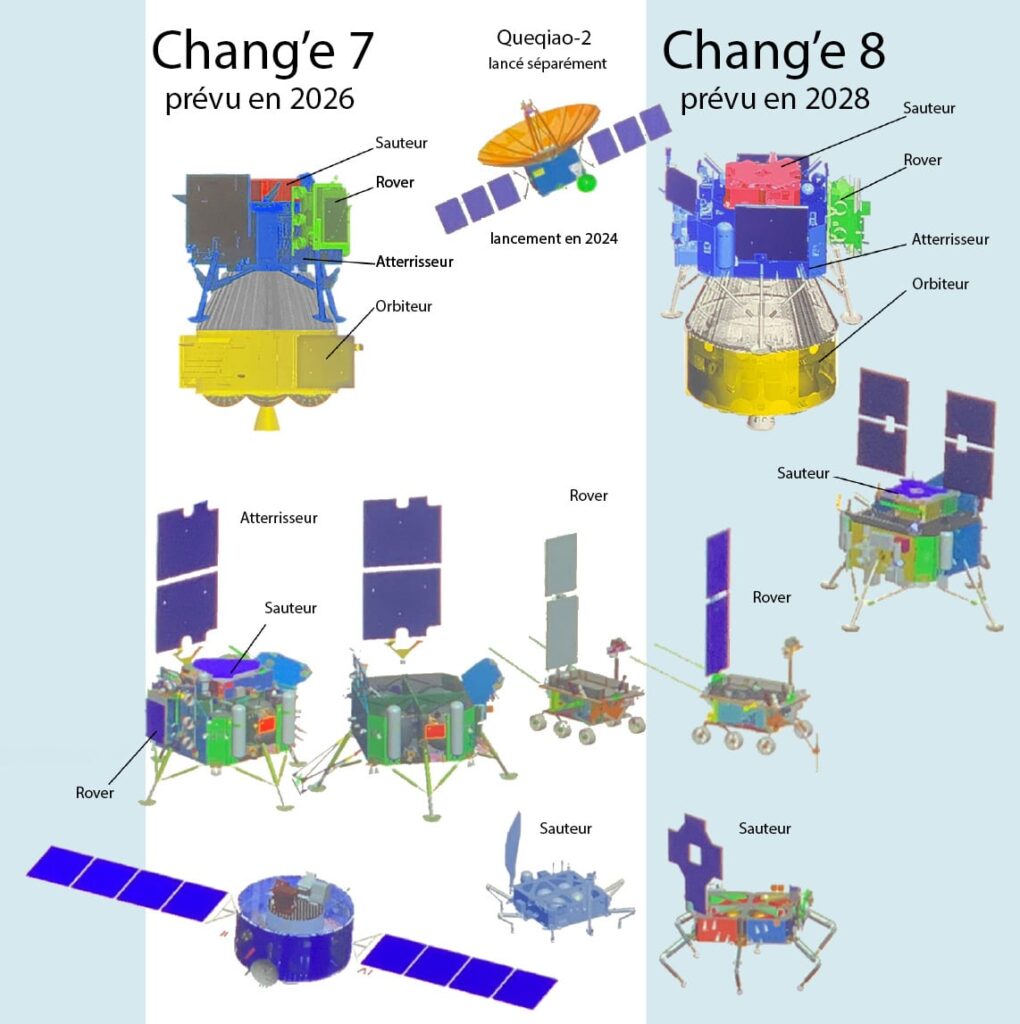
La mission réunit un orbiteur, un atterrisseur, un petit rover et le robot sauteur lunaire. Ensemble, ils poursuivent trois objectifs majeurs : localiser l’eau, caractériser l’environnement des PSR et évaluer l’exploitabilité des ressources.
Spectromètre : instrument qui sépare la lumière en ses longueurs d’onde pour identifier des « signatures » chimiques. Exemple : l’absorption près de 3 micromètres trahit des liaisons OH/H2O. Importance : c’est la méthode clé pour confirmer la présence d’eau et en estimer l’abondance.
Caméra à faible luminosité : capteur optimisé pour voir dans la pénombre extrême avec un bruit électronique très faible. Exemple : imager un terrain sombre où l’éclairement est des milliers de fois moindre qu’en plein jour lunaire. Importance : cartographier les micro-niches glacées sans dépendre du Soleil.
Thermomètre de surface : mesure locale de la température du régolithe. Exemple : différencier un grain sec à -180 °C d’un grain givré à -210 °C. Importance : relier la température aux poches de glace stables et guider les analyses du robot sauteur lunaire.
Ces instruments se complètent : l’imagerie trouve des textures, la spectroscopie identifie l’eau et les volatils, la thermique précise la stabilité. Comme en cuisine, on combine vue, odeur et thermomètre pour réussir une recette ; ici, on assemble données visuelles, chimiques et thermiques pour « cuisiner » un modèle cohérent des PSR.
Comment fonctionne le robot sauteur lunaire
Le robot sauteur lunaire privilégie des sauts courts et précis plutôt qu’un roulage continu. Cette locomotion réduit le contact avec un sol meuble et accroît la sécurité sur les pentes. Entre deux bonds, il stabilise sa pose, observe et choisit la trajectoire suivante.
Contrôle d’attitude : ensemble de capteurs et d’actionneurs qui orientent l’engin en vol et à l’atterrissage. Exemple : de petits propulseurs ou volants d’inertie ajustent l’inclinaison pendant un saut. Importance : garantir un posé stable, capteurs vers le bas, pour des mesures fiables.
Navigation relative : estimation du mouvement par rapport au terrain immédiat. Exemple : corréler deux images successives pour mesurer la dérive latérale. Importance : poser le robot sauteur lunaire exactement là où les signatures spectrales semblent prometteuses.
Éclairage scientifique : projecteurs embarqués calibrés pour la spectroscopie et l’imagerie. Exemple : éclairage à spectre connu pour corriger les couleurs en post-traitement. Importance : rendre reproductibles des mesures réalisées dans une obscurité totale.
Cette approche ressemble à un grimpeur qui progresse de prise en prise : il anticipe, teste l’appui, puis engage le mouvement. Le robot sauteur lunaire gère de la même manière ses points de contact et son exposition aux risques.
Calendrier, sites candidats et défis opérationnels
Chang’e 7 vise une fenêtre de lancement en 2026 et un alunissage proche du pôle Sud. Les sites candidats conjuguent accès aux PSR et zones éclairées sur des sommets voisins pour l’atterrisseur et le rover. Cette proximité permet au robot sauteur lunaire d’entrer et de ressortir d’une PSR tout en maintenant un lien robuste avec le module au sol.
Satellite relais : engin en orbite qui transmet les données entre une sonde au sol et la Terre quand la ligne de vue est masquée. Exemple : une orbite polaire elliptique offrant des fenêtres de communication régulières. Importance : assurer un débit stable pour la télémétrie et les commandes du robot sauteur lunaire dans les cratères.
Les défis clés : l’extrême froid, l’abrasivité de la poussière et l’autonomie énergétique. Les PSR imposent une gestion thermique et électrique serrée. Les équipes dimensionnent les sauts, limitent le temps d’exposition et planifient des campagnes courtes mais répétées, comme des sprints successifs plutôt qu’un marathon continu.
À l’échelle opérationnelle, même 50 à 100 mètres parcourus en bonds bien placés peuvent offrir des relevés décisifs, car l’hétérogénéité des PSR se joue au mètre. Le rôle de l’orbiteur et des cartes antérieures est alors crucial pour choisir des couloirs d’exploration très ciblés.
Ce que la chasse à l’eau change pour l’exploration
ISRU (utilisation des ressources in situ) : stratégie qui consiste à produire sur place ce qui est nécessaire à une mission. Exemple : extraire de l’eau pour fabriquer de l’oxygène respirable et du carburant. Importance : réduire la masse à lancer depuis la Terre et rendre durables les opérations lunaires.
Confirmer et quantifier l’eau aux bons endroits, c’est passer de la théorie à l’ingénierie. Le robot sauteur lunaire fournit des cartes et des échantillons « numériques » à l’échelle du mètre, indispensables pour définir où implanter des démonstrateurs, où creuser et comment stocker les volatils sans les perdre.
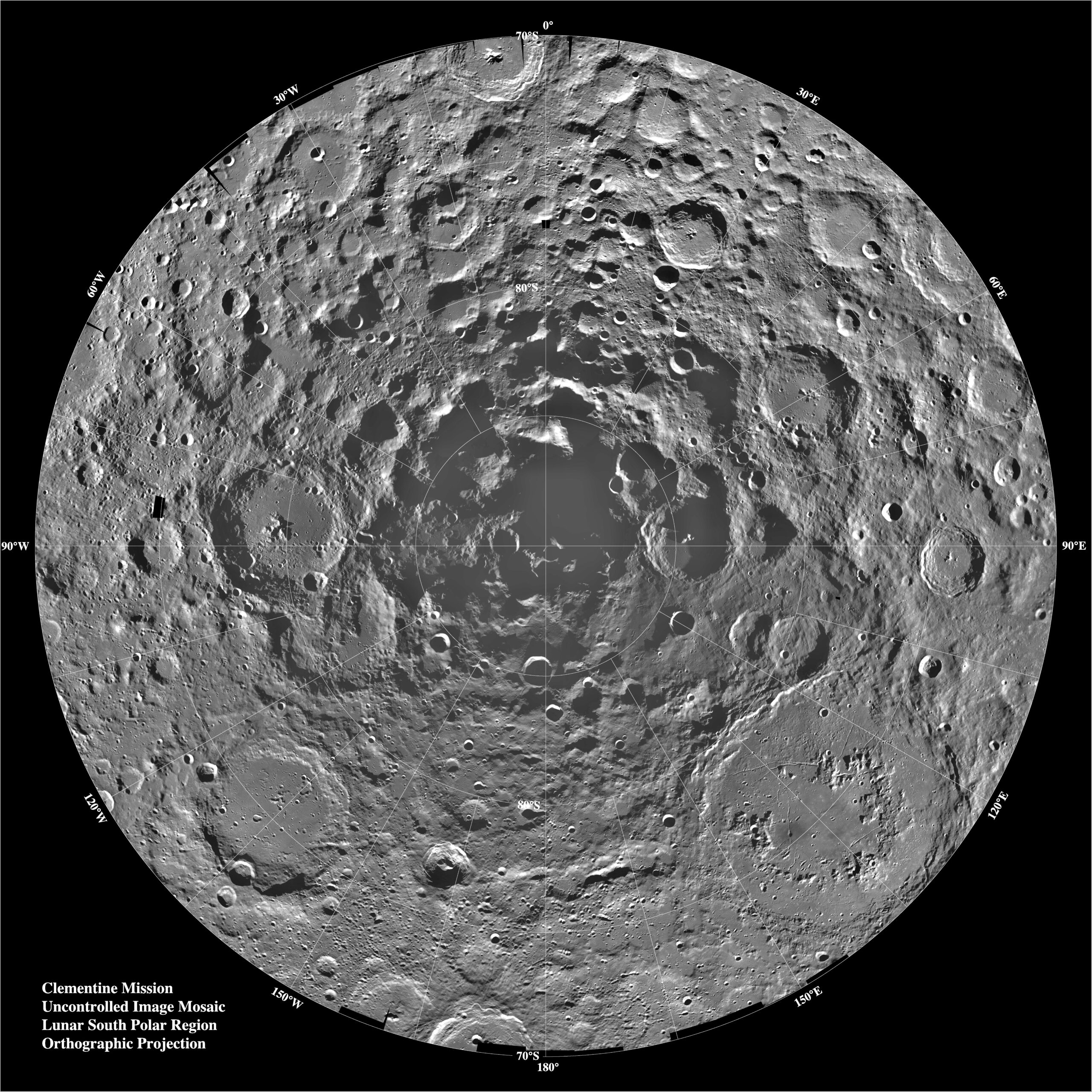
Historiquement, l’idée de glace polaire sur la Lune a émergé par indices orbitaux, de Clementine à LRO en passant par Chandrayaan-1. Chang’e 7 ajoute la pièce manquante : vérifier sur place, dans l’ombre, avec des capteurs dédiés. C’est un basculement comparable à l’arrivée d’un réseau de métro : au début on esquisse le tracé, puis on creuse les stations clés pour rendre l’ensemble vraiment utile.
Si Chang’e 7 atteint ses objectifs, les prochaines étapes – prospection approfondie et tests de technologies d’extraction – gagneront un cap solide. Et l’écosystème lunaire, scientifique comme industriel, saura où se concentrer.
En résumé, le robot sauteur lunaire de Chang’e 7 ouvre la porte des cratères les plus inaccessibles du pôle Sud. Par sa mobilité par bonds, sa panoplie d’instruments et une architecture de mission taillée pour l’ombre éternelle, il peut transformer des soupçons en cartes exploitables. La chasse à l’eau guide désormais la stratégie lunaire ; avec Chang’e 7, elle entre clairement dans le concret.